Yi's Academic Projects
Some things are done now or never.
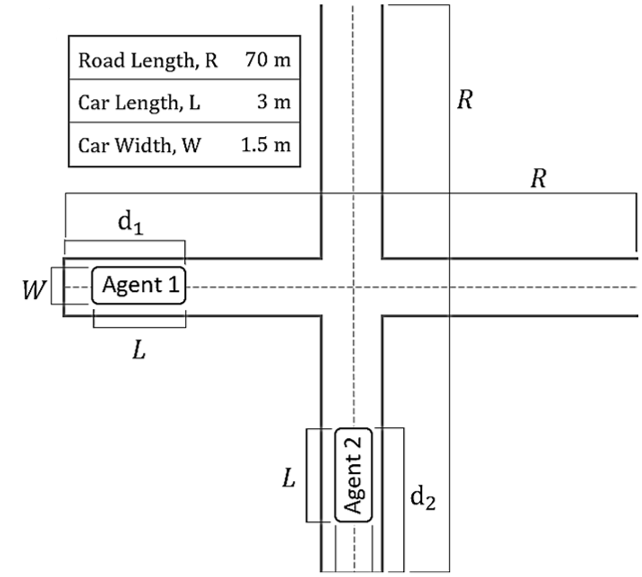
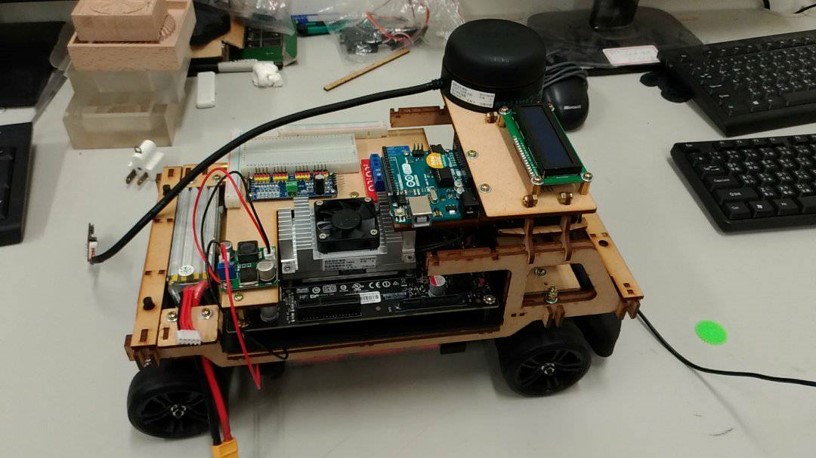
ICRA 2021: Empathetic Multi-agent Interaction
Human-robot interaction research focusing in two-agent autonomous vehicle negotiating through an uncontrolled intersection utilizing parameter estimation technique and game theory. Paper is acknowledged by IEEE International Conference on Robotics and Automation, 2021.